MicroROS and Electronics for Robotics Course - Python
Build a fully functional micro-ROS robot from scratch while learning to bridge embedded hardware with ROS 2 for real-time robotic intelligence.
Course Summary
In this hands-on course, you’ll explore the foundations of embedded systems and robotics by building your own micro-ROS robot from the ground up. You’ll assemble the physical structure, wire up motors, sensors, and microcontrollers, and gradually progress to programming real-time behavior using the micro-ROS framework. You’ll learn how micro-ROS brings ROS 2 capabilities to the embedded world, enabling seamless communication between low-level hardware and high-level robotic intelligence. By the end of the course, you'll have a fully functioning robot that senses, moves, and communicates — all from a microcontroller. From setting up your development environment to deploying real-time code on microcontrollers, this course bridges the gap between electronics and modern robotic software design.
What you will learn
・Assembling the physical structure of your robot ・Wiring motors, sensors, and power systems ・Understanding the role of microcontrollers in robotics ・Setting up your embedded development environment ・Installing and using micro-ROS on supported microcontrollers ・Programming real-time control logic for actuators and sensors ・Communicating with ROS 2 nodes via micro-ROS ・Using publish/subscribe and service mechanisms in embedded systems ・Micro-ROS timers and executors ・Deploying and debugging code on microcontrollers
Course Overview
Introduction
This unit is a brief introduction to the contents of the course.
A first contact with Micro-ROS
In this unit you will learn how to program your first microROS nodes. You will set up the environment on your host machine to be able to locally run ROS2, you will learn how to develop a microROS application and flash the firmware in your board.
Robot Assembly
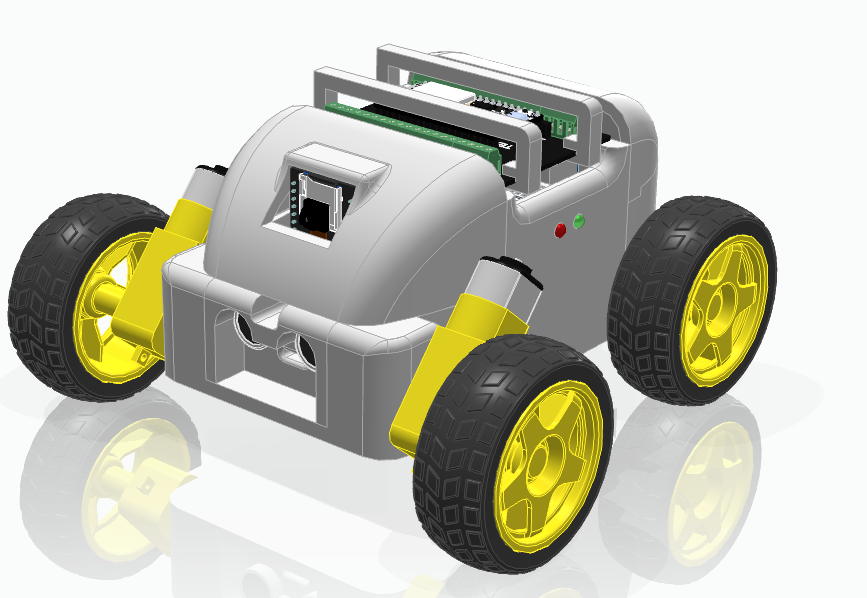
In this unit you will learn how to assemble PEDRITO, the robot we will use through the course to teach you MicroROS.
Controlling the actuators
In this unit you will learn how to remotely control PEDRITO´s actuators: its DC motors and external LEDs. Furthermore, you will dive deeper in topics like ROS2 topics, timers and excecutors.
Accessing sensor data
In this unit you will learn how to access PEDRITO´s sensors data using the microROS framework. You will also learn about ROS services in microROS.
PEDRITO is no longer blind
In this unit, you will learn how to connect PEDRITO’s ESP32-CAM module to the ROS 2 network. You will also develop and deploy a visualization interface that allows you to monitor all of the robot’s sensor data together in a single, integrated display.
Don´t get too close
This final project unit challenges you to apply everything you've learnt throughout the course. You will implement an autonomous behavior in PEDRITO, triggered through a micro-ROS service
Teachers
Estanislao Escudero
I'm a Mechanical Engineer who looks forward to learn more about robotics and AI.

Robots used
pedrito robot